自动转动(测角)平台指南
规格表阅读方法
 |
| SA07A-RT02 |
| 规格表 | 说明 | ||
| 型号 | SA07A-RT02 | 1. 型号名称。 | |
| 反向型号 | SA07A-RT02-R | 2. 对称的型号。 | |
| 台面尺寸 | 70mm×70mm | 3. 平台上表面的大小。 | |
| 导轨方式 | 精密十字滚柱导轨 | 4. 表示平台的导轨方式。 | |
| 旋转范围 | ±10° | 5. 以中心点为基准,以正负表示。 | |
| 传动方式 | 蜗轮蜗杆 | 6. 平台的传动方式。 | |
| 分辨率 | 整步/半步 | 0.00153°/0.000765° | 7. 因微步分割数不同而异的平台各分辨率。 |
微步(1/20分割) |
0.0000765° | ||
| 最高速度 | 7.65°/sec | 8. 平台可动作的最高速度(半步、10kpps时)。 | |
| 旋转中心高度 | 70mm±0.2mm | 9. 平台上面至旋转中心的距离。 | |
| 旋转中心偏移量 | Φ0.05mm/±10° | 10. 在移动范围内旋转中心的偏移量。 | |
| 空程 | ≦0.003° | 11. 请参见检查方法。 | |
| 背隙 | ≦0.001° | 12. 请参见检查方法。 | |
| 刚度 | 0.09 arcsec/N・cm | 13. 平台承受单位力矩负载时的倾斜角度。 | |
| 水平承载能力 | 49N(5kgf) | 14. 平台中央可承受的负载。 | |
| 主要材料 | 铝合金 | 15. 表示使用的主要材料。 | |
| 外观 | 白色表面氧化处理 | 16. 表示外观颜色及表面处理。 | |
| 自重 | 095kg | 17. 产品的重量。 | |
| 直交度 | − | 18. 表示两轴组合平台的直角交叉误差。 | |
| 自重 | 5相步进电机 |
19. 表示使用的执行器的型号。 | |
| 连接器 | 圆形20针 |
20. 平台上使用的连接器形状与针数。 | |
| 平台接线类型 | V3 | 21. 平台与步进电机以及光电传感器的接线形式。 | |
| 价格(日元) | 149,000 | 22. 表示标准产品的价格。 | |
| 大修费(日元) ※ | 36,000 〜 | 23.表示大修费用。 | |
| 洁净润滑脂更换费(日元) | 24,000 | 24.表示更换为洁净润滑脂的费用。 | |
| 真空润滑脂更换费(日元) | 24,000 | 25.表示更换为真空润滑脂的费用。 | |
| 同形电机更换费(日元) | 12,000 〜 | 26.表示更换为安装尺寸与标准电机相同的电机时的费用。 | |
| 异形电机更换费(日元) | 30,000 〜 | 27.表示更换为安装尺寸与标准电机不同的电机时的费用。 | |
※ 大修费不包括零部件费。
导轨方式
●十字滚柱导轨
| 十字滚柱导轨是由具有90°V形槽的滚柱轨道和圆柱滚子构成的导轨方式(参见图-1)。滚柱轨道的滑动面经过淬火和研磨精加工,平面度的精度高,硬度高。在这两个滚柱轨道夹持的空间内,交错配置着圆柱滚子。当平台移动时,多个圆柱滚子在滚柱轨道上滚动,因此,从停止状态启动时摩擦的变化(静摩擦与动摩擦之差)小。此外,由于十字滚柱导轨利用线接触支撑载荷,刚度比滚珠导轨机构高。十字滚柱导轨使用的是本公司独自设计的产品,刚度大,精度高,精密控制滚柱轨道与圆柱滚子间施加的预压以维持着高刚度。 | 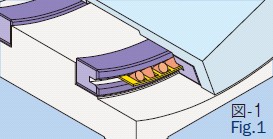 |
传动方式
●蜗轮蜗杆
| 可通过蜗轮与蜗杆的啮合产生大的传动力。这形成了减速传动,但相应地提高了传动精度。 | 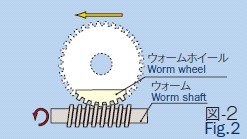 |
●滚珠丝杆
| 滚珠丝杆采用在螺杆与螺母之间夹持滚珠的结构(图-3)。如果使螺杆转动,滚珠一边在螺杆与螺母之间滚动一边移动,重新返回原来的地方。由于利用滚珠的滚动,摩擦小,可获得高的传递效率,静摩擦与动摩擦相差小,不易引起粘滑现象。 | 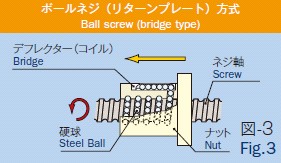 |
滚珠丝杆的特征
| ●高耐久性 滚珠丝杆传动具有优越的耐久性。 ● 小型化、轻量化 由于滚珠丝杆的动力传递效率高,因此,可采用小型电机,实现紧凑化。 <安装滚珠丝杆转动平台时的注意事项> 如果使用控制器驱动,则由限位传感器检测,安装孔不会露出来,因此,请手动移动平台,直到露出安装孔进行固定。 ※驱动时请务必使其返回原点附近,然后接通电源。 |
移动量
●蜗轮蜗杆
| 通过使直接连在蜗杆上的电机转动,调节倾斜角度。倾斜角度与电机旋转量之间具有以下关系: |
Δθs = Δθ / n・m |
| 型号 | 减速比n | 电机的基本步距角 (°/pulse) |
| SA04B-RT02 | 268 | 0.36 |
| SA04B-RM02 | 364 | 0.36 |
| SA05B-RT02 | 232 | 0.36 |
| SA05B-RM02 | 300 | 0.36 |
| SA05B-RB02 | 372 | 0.36 |
| SA07A-RT02 | 235 | 0.36 |
| SA07A-RM02 | 300 | 0.36 |
| SA07A-RB02 | 375 | 0.36 |
| SA10A-RT01 | 320 | 0.72 |
| SA10A-RM01 | 428 | 0.72 |
| SA10A-RB01 | 536 | 0.72 |
| SA13A-RT01 | 288 | 0.72 |
| SA13A-RM01 | 400 | 0.72 |
| SA16A-RT01 | 510 | 0.72 |
| SA16A-RM01 | 600 | 0.72 |
最高速度
| 最高速度取决于高速域的电机和驱动器的转矩特性,但本公司定义的最高速度是将驱动器设为半步,使其以10kpps动作时的速度。 除了10kpps,在各自规格栏中进行描述。 |
●滚珠丝杆
| 由于将直线运动转变为旋转运动,因此,最小分辨率因平台位置而异。 |
・ 最小分辨率 |
| 型号 | Δθ | P | R |
| SA05A-R2T01 | 0.72 | 1 | 53.9 |
| SA05A-R2M01 | 0.72 | 1 | 71.9 |
| SA05A-R2B01 | 0.72 | 1 | 89.9 |
| SA05A-R2G01 | 0.72 | 1 | 107.9 |
| SA07A-R2T01 | 0.36 | 1 | 75.75 |
| SA07A-R2M01 | 0.36 | 1 | 101.75 |
| SA07A-R2B01 | 0.36 | 1 | 127.75 |
| SA10A-R2T01 | 0.36 | 1 | 101.375 |
| SA10A-R2M01 | 0.36 | 1 | 139.375 |
| SA10A-R2B01 | 0.36 | 1 | 177.375 |
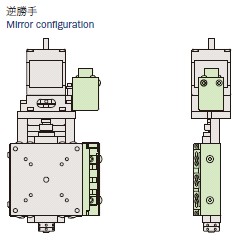
对称(反向、组合方向)
| 本公司可根据顾客的要求无偿应对左右反转安装连接器和传感器的反向规格。此外,对于2轴组合平台,本公司也应对标准平台与反向平台的组合。 |
 |
 |
●2轴组合对称一览
在型号末尾附加-***。
 |
 |
 |
 |
 |
 |
 |
 |