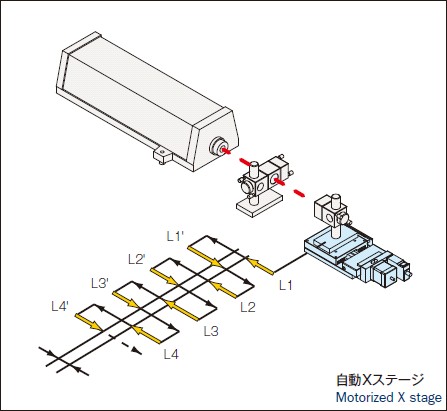
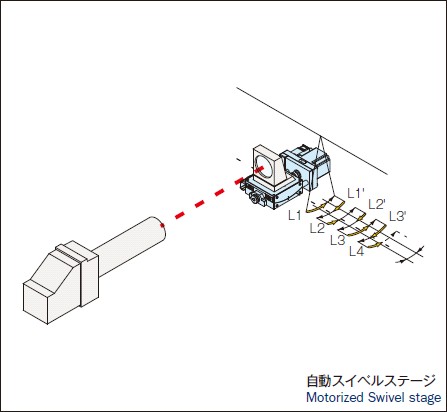
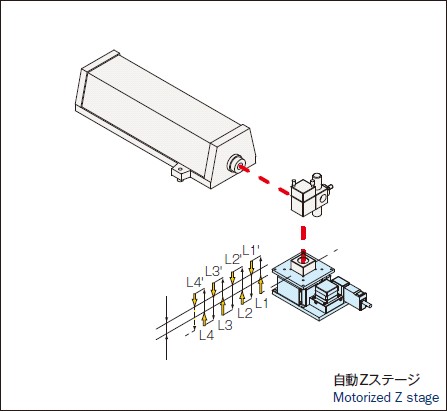
对任意位置(作为基准的测量位置),从正向(电机旋转CW方向)进行定位,测量该位置(L1)。 然后使其朝正向移动后,朝负向(电机旋转CCW方向)发出同量指令,使其移动后进行定位,测量该位置(L1’)。 使其朝负向移动后,接着朝正向发出同量指令,使其移动后进行定位,测量该位置(L2)。分别朝正向和负向进行7次定位测量,求得停止位置的平均值之差,将最大差值作为空程。 X平台的规定位置是指中间和两端的3点,转动平台及Z平台的规定位置是指中间1点。