薄型平台指南
规格表阅读方法
 |
| YRA-070 |
| 规格表 | 说明 | ||
| Model Number | YRA-070 | 型号名称。 | |
| Table Size | 70mm×70mm | 平台上表面的大小。 | |
| Guide Mechanism | XY:Cross-Roller Guide θ:Cross-Roller Bearing |
平台的导轨方式。. | |
| Motion Range | XY:±3mm θ:±3° | 以中心点为基准,以正负表示。 | |
| Lead Mechanism | Ball Screw, Lead 1.0mm | 平台的传动方式。 | |
| Resolution Full/Half Step | XY:2μm/1μm θ: ≈0.002546°/0.001273° |
因微步分割数不同而异的平台各分辨率。 | |
| Maximum Speed | XY:10mm/sec : Half 10kpps θ:12.7°/sec : Half 10kpps |
平台可动作的最高速度(半步、10kpps时)。 | |
| Lost Motion | X:≦ 2μm(AVE. 0.356μm) Y:≦ 2μm(AVE. 0.354μm) θ:≦ 0.005°(AVE. 0.0013°) |
请参见检查方法。 | |
| Straightness | Horizontal | X:≦ 1μm/6mm(AVE. 0.237μm/6mm) Y:≦ 1μm/6mm(AVE. 0.253μm/6mm) |
因微步分割数不同而异的平台各分辨率。 |
| Vertical | X:≦ 1μm/6mm(AVE. 0.154μm/6mm) Y:≦ 1μm/6mm(AVE. 0.187μm/6mm) |
||
| Repeatability | X:≦±0.5μm(AVE. ±0.088μm) Y:≦±0.5μm(AVE. ±0.075μm) |
请参见检查方法。 | |
| Angular Repeatability | θ:≦ 0.001°(AVE. 0.0002°) | 请参见检查方法。 | |
| Backlash | X:≦ 1μm(AVE. 0.35μm) Y:≦ 1μm(AVE. 0.288μm) θ:≦ 0.005°(AVE. 0.0013°) |
请参见检查方法。 | |
| Surface Runout | θ:≦5μm/±3°(AVE. 2.708μm/±3°) | 请参见检查方法。 | |
| Eccentricity | θ:≦3μm/±3°(AVE. 0.517μm/±3°) | 请参见检查方法。 | |
| Moment Load Stiffness | 0.31 arcsec/N・cm | 平台承受单位力矩负载时的倾斜角度。 | |
| Load Capacity (Horizontal) | 49N (5kgf) | 平台中央可承受的负载。 | |
| Material | Aluminum Alloy | 表示使用的主要材料。 | |
| Finish | Clear-Matt Anodizing | 表示外观颜色及表面处理。 | |
| Weight | 1.7kg | 产品的重量。 | |
| Motor | PK513PB (Oriental Motor: Phase Current 0.35A, Basic Step Angle 0.72°, 5-Leads) | 表示使用的执行器的型号。 | |
| Connector | 20Pin Round (Hirose: RP13A-12JG-20PC) | 平台上使用的连接器形状与针数。 | |
| Stage Wiring Type | V3 | 平台与步进电机以及光电传感器的接线形式。 | |
| Sensor Model | XY:F-106(HOME, LIMIT), θ:F-106R(HOME, LIMIT) | 光电传感器基板 | |
| Price (JPY) | ¥450,000 | 价格(JPY) | |
| Lubricant Change(JPY) | ¥45,000 | 润滑油更换费 | |
| Motor Change(JPY) | Same size ¥45,000 different size ― |
电机更换费 | |
| Overhaul Price(JPY) | ¥120,000 | 大修费 ※ | |
{kind=link}
※大修费用不包括零部件费
导轨方式
●十字滚柱导轨
| 十字滚柱导轨是由具有90°V形槽的滚柱轨道和圆柱滚子构成的导轨方式(参见图-1)。滚柱轨道的滑动面经过淬火和研磨精加工,平面度的精度高,硬度高。在这两个滚柱轨道夹持的空间内,交错配置着圆柱滚子。当平台移动时,多个圆柱滚子在滚柱轨道上滚动,因此,从停止状态启动时摩擦的变化(静摩擦与动摩擦之差)小,动作中不易引起滑动。此外,由于十字滚柱导轨利用线接触支撑载荷,刚度比滚珠导轨机构高。十字滚柱导轨使用的是本公司独自设计的产品,刚度大,精度高,精密控制滚柱轨道与圆柱滚子间施加的预压,以维持着高刚度。 | 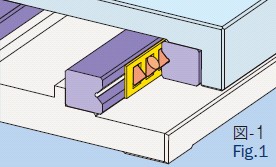 |
●十字滚柱轴承
| 十字滚柱轴承是由具有90°V形槽的滚柱轨道和圆柱滚子构成的导轨方式(参见图-2)。滚柱轨道的滑动面经过淬火和研磨精加工,滑动面的平面度的精度高,硬度高。在这两个滚柱轨道夹持的空间内,交错配置着圆柱滚子。当平台移动时,多个圆柱滚子在滚柱轨道上滚动,因此,从停止状态启动时摩擦的变化(静摩擦与动摩擦之差)小。此外,由于十字滚柱轴承利用线接触支撑负载,刚度比滚珠轴承机构高。 | 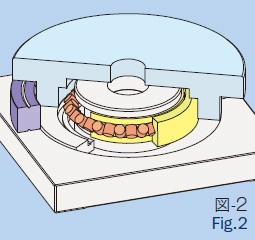 |
传动方式
●滚珠丝杆
| 滚珠丝杆采用在螺杆与螺母之间夹持滚珠的结构(图-4)。如果使螺杆转动,滚珠一边在螺杆与螺母之间滚动一边移动,重新返回原来的地方。由于利用滚珠的滚动,摩擦小,可获得高的传递效率,静摩擦与动摩擦相差小,不易引起粘滑现象。 |
 |
XY平台 分辨率
| 平台分辨率可由下式求得。 |
ΔX = (p・Δθ/ 360m ) |
| ※本公司使用基本步距角0.36°/整步和0.72°/整步的两种电机,传动螺杆使用螺距0.5mm~5mm。此外,产品目录上记载的最小分辨率是以微步分割数为2(半步)计算所得的值。 |
θ平台 分辨率
| θ平台(滚珠丝杆)平台分辨率可由下式求得: |
Δθs =tan-1 (Δθ・P / 360・R・m) |
参考资料:滚珠丝杆的距离(mm)/strong>
| 型号 | R (mm) |
| YRA-070 | 45 |
| YRA-071 | 45 |
| YRA-130 | 85 |
| YRA-200 | 115 |